⚙️ Stepper Motor Precision Driver
Achieve exact angular positioning with a 28BYJ-48 stepper motor — 200 steps equals one perfect revolution every time.
Overview
Stepper motors divide a full 360° rotation into hundreds of discrete 'steps.' Unlike DC motors, they move to exact positions without any position feedback. They are the backbone of 3D printers, CNC machines, and robotic arms.
Technical Insight: The 28BYJ-48 is a 5-phase unipolar stepper motor that completes one revolution in 512 steps (in full-step mode) or 2048 steps (in half-step mode). The ULN2003 driver chip contains 7 Darlington transistor pairs, each capable of sinking 500mA — exactly what the motor coils need.
In simple terms: By sending electrical pulses to the four coils in a specific sequence (1000 → 1100 → 0100 → 0110...), we make the rotor latch to each magnetic pole in turn, giving us precise steps of about 5.625° each.
What you'll learn: Stepper motor coil sequencing, the Arduino Stepper.h library, RPM control, direction reversal, and understanding gear ratio reduction.
Estimated time: 35-50 minutes. Difficulty: ⭐⭐ Easy. Perfect for robotics and CNC enthusiasts.
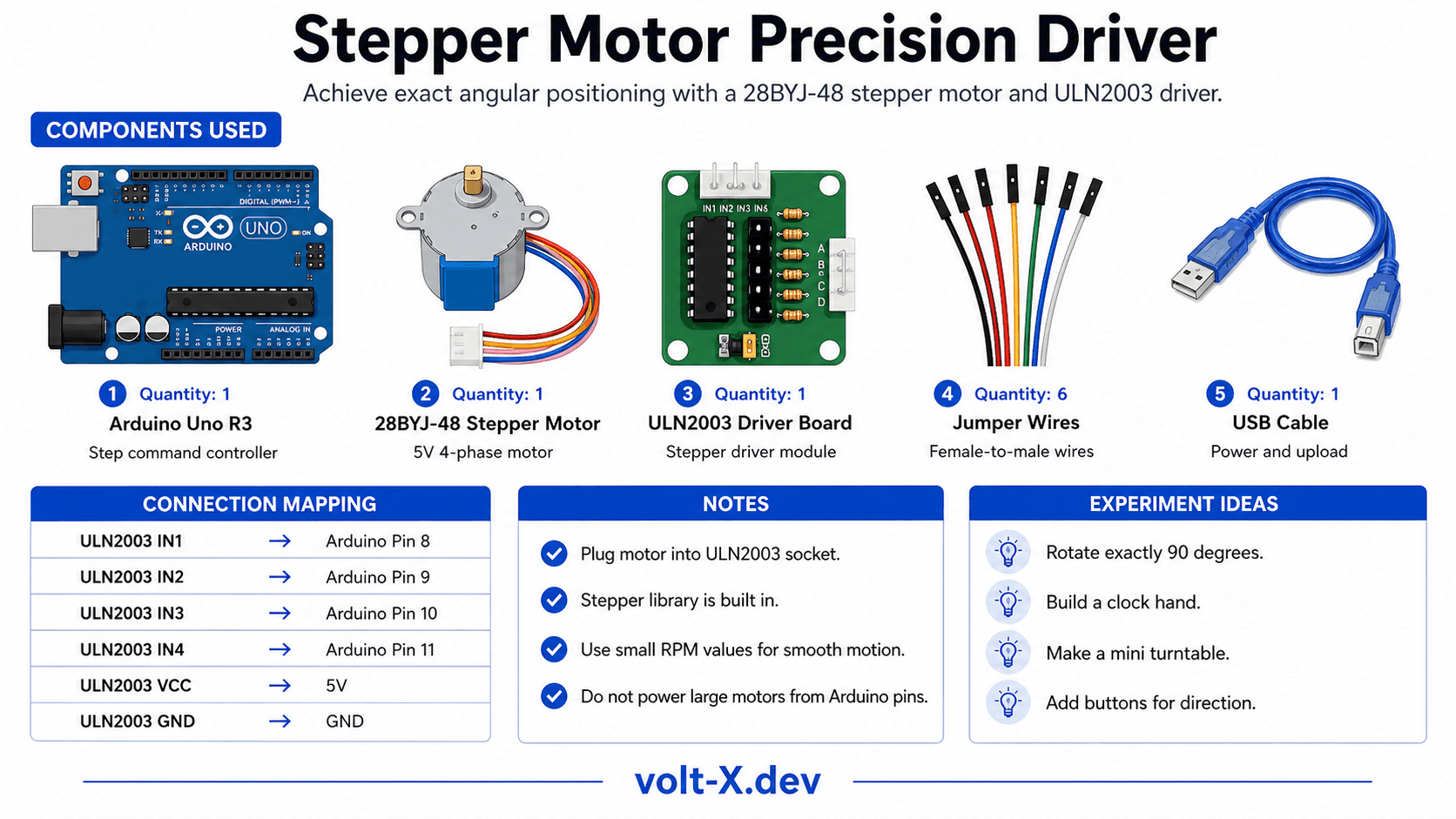
Components Needed
| Component | Specification | Qty | Notes |
|---|---|---|---|
| Arduino Uno R3 | 5V | 1 | |
| 28BYJ-48 Stepper Motor | 5V, 4-phase unipolar | 1 | Common blue stepper |
| ULN2003 Driver Board | 5V, 4-channel | 1 | Usually comes bundled with motor |
| Jumper Wires | Female-to-Male | 6 | |
| USB Cable | Type A to B | 1 | Powers motor and Arduino |
Component Pin Mapping
Step-by-Step Tutorial
Connect the Motor
Wire to Arduino
Install Library
Stepper.h library is built into Arduino IDE. No additional installation needed.Upload and Observe
Customize Steps
STEPS_PER_REV and mySpeed to experiment with different angles and RPM settings.Arduino Code
// Stepper Motor Driver — Volt X
// 28BYJ-48 + ULN2003, pins 8-11
#include <Stepper.h>
const int STEPS_PER_REV = 2048; // Full steps per output revolution
const int mySpeed = 10; // RPM (1–15 works well for 28BYJ-48)
// Create stepper object (note pin order for 28BYJ-48!)
Stepper myStepper(STEPS_PER_REV, 8, 10, 9, 11);
void setup() {
myStepper.setSpeed(mySpeed);
Serial.begin(9600);
Serial.println("Stepper Motor Driver — Volt X");
}
void loop() {
Serial.println("Clockwise — 1 revolution");
myStepper.step(STEPS_PER_REV); // Forward
delay(1000);
Serial.println("Counter-clockwise — 1 revolution");
myStepper.step(-STEPS_PER_REV); // Reverse
delay(1000);Reviews & Ratings
Sign in to leave a review
Loading reviews...